Imagine getting all sorts of excited to go on a long road trip that you’ve always dreamed of taking with your best buddies.それは、親友と一緒に行くのが夢だった、長いドライブ旅行に行くことを想像してください。 そして……運転できるのは自分だけだと気づくのです。 1000キロの長旅が待っている。 何百キロもまっすぐな道が続き、4〜5時間も走り続けることを考えると、運転する前から疲れてしまう。 幸いなことに、そんなときこそクルーズコントロールの出番です。
クルーズコントロールは、現代の自動車にとって非常に貴重な機能です。 これがなければ、少なくとも運転手にとっては、長い道のりの旅ははるかに疲れるものになるでしょう。 これは、アメリカの道路が一般に広く、まっすぐで、目的地がはるかに遠いためです。
クルーズコントロールとは何ですか?
クルーズコントロールシステムの目的は、スロットル-アクセルペダルのリンケージを制御することによって、外部の介入なしにドライバーによって設定された速度を正確に維持することです。 発明家で機械技師のジェームズ・ワットは、17世紀にはすでにこの方式を開発し、蒸気機関が傾斜を上り下りしても一定の速度を維持できるようにした。 今日のクルーズコントロールは、1940年代後半に発明されたもので、路面速度を操作し、それに応じてスロットルを調整できる電気制御の装置を使用することが考え出されたのである。
クルーズコントロールの仕組み
クルーズコントロールシステムは、あなたがスロットル(アクセル)の位置を調整するのと同じ方法で、車の速度を制御します。 ただし、クルーズコントロールはペダルを踏むのではなく、アクチュエーターにつながったケーブルでスロットルバルブにかみ合わせます。 スロットルバルブは、(内燃機関なので)空気を取り込む量を制限して、エンジンのパワーとスピードをコントロールします。
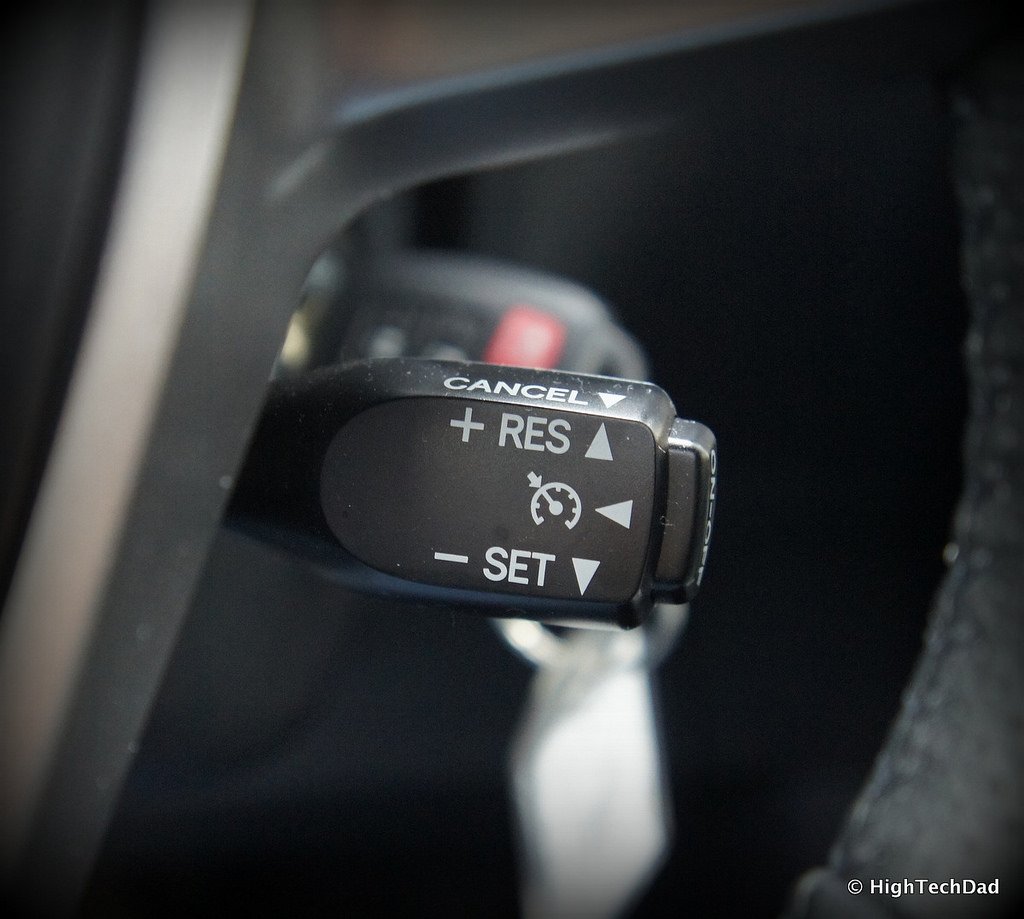
クルーズコントロールに使われるコントロールシャフトです。 (画像出典: flickr.com/hightechdad)
ドライバーはクルーズスイッチでクルーズコントロールを設定しますが、通常、ON、OFF、RESUME、SET/ACCEL、COASTから構成されるスイッチです。 これらは通常、ステアリングホイール、またはフロントガラスワイパーやターンシグナルストークに配置されています。 SET/ACCELノブは、車の速度を設定します。 1回たたくと1mph、2回たたくと2mphと加速します。 逆にたたくと減速します。
アダプティブクルーズコントロール(ACC)とは
しかし、道路を走る車の数がかつてないほど増加し、通常のクルーズコントロールの機能は陳腐化しつつあります。 アダプティブクルーズコントロールは急速に人気を集めていますが、それには理由があります!
アダプティブクルーズコントロールは、新車の自動速度管理という点では次の大きな流れです。
アダプティブクルーズコントロールの仕組みは?

ACCにおけるドライバーの視界(イメージソース:commons.wikimedia.org)
通常のクルーズコントロールと同様にドライバーが最高速度をセットする。 車の前端にあるレーダーセンサーが前方の交通状況を把握し、前方の車をロックオンします。 このセンサーが、常に前の車より2〜3秒遅れて走るように、車の速度をコントロールする。
レーダーセンサーからの入力をもとに、コンピュータユニットが先行車の距離を測定し、それに対する速度を計算します。
例えば、前方の遅い車に近づいたり、他の車が前に割り込んできたりすると、アダプティブクルーズコントロールはエンジンマネジメントの修正制御を開始し、必要ならブレーキシステムも作動させて、車を減速させるのです。
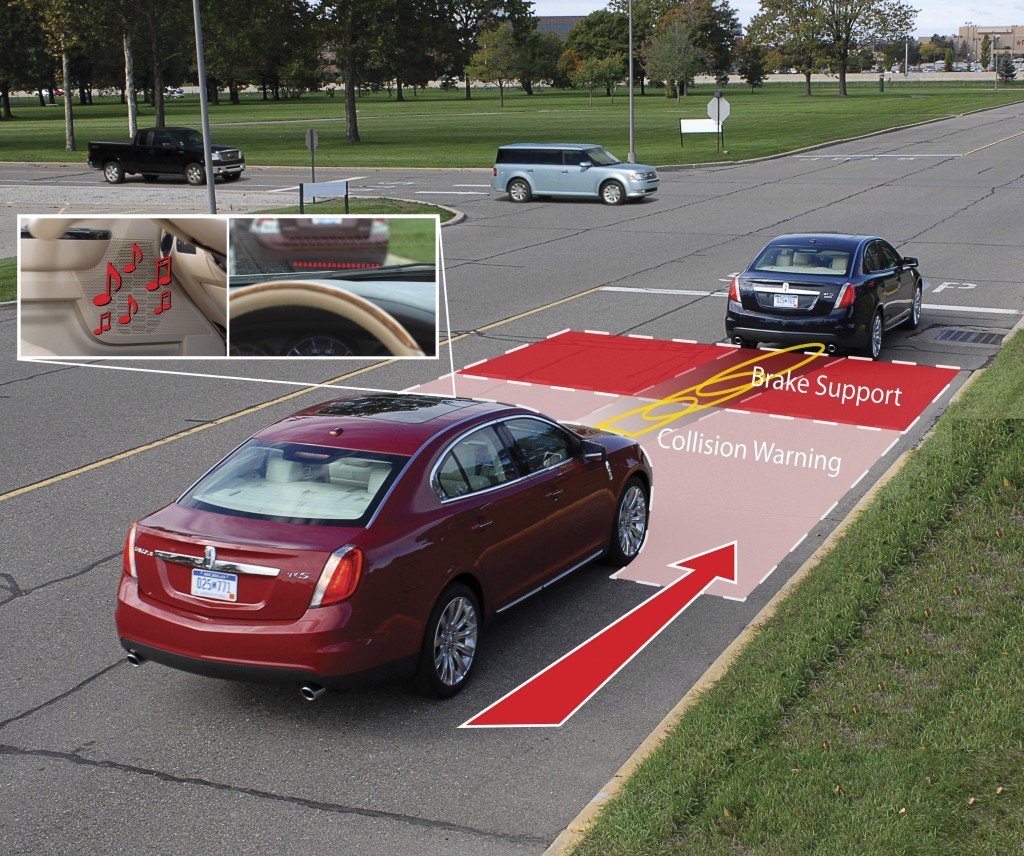
アダプティブクルーズコントロールの仕組み(画像出典:Wikipedia.org)
ACC は安全に関しては非常に良心的なシステムだと思います。 前のクルマに近づきすぎた場合、2段階で警告してくれます。 まず、視覚と聴覚の信号で警告し、次に短いブレーキ音で警告します。 必要であれば、車を完全に停止させます。 レーザーによるものや、立体視カメラによる光学式もあります。
Future applications of adaptive cruise control
Google は数年前に自動運転車を発表したが、これは完全に自律走行制御の技術に依存している。 (画像出典:wikimedia.commons.org)
この車には合計8つのセンサーが搭載されています。 最も目立つのは、回転するルーフトップのライダーで、32または64個のレーザーの配列を使って物体までの距離を測定し、200mの距離で3Dマップを構築して、潜在的な危険を分析することができるカメラです。 これは、歩行者、自転車、他のドライバーなど、近くにある危険物を探すと同時に、道路標識を読み取り、信号を検出します。 バンパーに取り付けられたレーダーは、すでに自律走行クルーズコントロールに使用されており、車の前方および後方の車両を監視する。 (画像出典:monicaodo)
外装面では、GPS衛星から位置情報を受信する空中アンテナを後部に搭載し、後輪の1つには車の動きを監視する超音波センサーを搭載しています。 車内には高度計、ジャイロスコープ、タコメーターがあり、さらに細かな位置情報を計測しています。 これらのセンサーが完璧に連動し、車の位置情報を正確に取得することで、さらなる安全性を提供します。
厳格なテストの後、グーグルは、自動運転車が70万マイル(112万キロメートル)以上を走行し、そのうちの1台による事故は記録されていないと発表しました(1台は後ろから衝突しましたが、相手のドライバーに過失がありました)。 これは、ヒューマン エラーによって毎日どれだけの事故が発生しているかを考えると、信じられないほど素晴らしい数字です。
自動クルーズ コントロールは、まもなく将来のすべての自動車で義務付けられる予定です。 したがって、今度運転中に居眠りをしている人を見かけても、びくびくしないでください……クルーズ コントロールはすべてを把握しています!
車が自律的に判断し始め、私たち「ちっぽけな」人間に対して反乱を起こすには、どれくらいかかるのか気になりますね!
。